در بخش نخست این مقاله روشهای مختلف اندازهگیری و کالیبراسیون «مخازن ذخیرهی استوانهای ایستاده» که مورد تأیید انستیتو نفت آمریکا (API) و سازمان استاندارد جهانی (ISO) نیز هست، بررسی شدند و مقایسهی مختصری بین این روشها انجام شد و مزایا و معایب هر کدام بیان گردید. در قسمت دوم راهکاری جدید جهت کالیبراسیون مخازن ایستاده ارائه میگردد.
2-3 روش محاسبات مثلثاتی
روش محاسبات مثلثاتی[i] (OTM) به عنوان روشی جایگزین برای Strapping با استفاده از نوار اندازهگیری (MTSM) که از روش خط دید مبنا (ORLM) نیز دقیقتر میباشد، بهکار میرود. با استفاده از دوربین تئودولیت و روش مثلثاتی به دو روش کاملاً متفاوت نسبت به محاسبهی محیطی و کالیبراسیون اقدام میشود. روشی بر اساس اندازهگیری یک محیط مبنا و دیگری بر مبنای فاصلهی دو ایستگاه معیار محاسبهی محیط حلقههای مختلف میباشد. ]8[ ]4[
2-3-1 استفاده از روش مثلثاتی بر اساس محیط مبنا
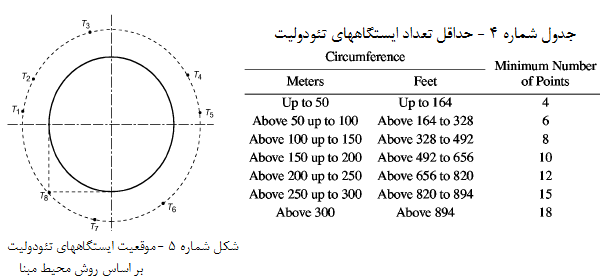
محیط مبنا[1] با استفاده از نوار، اندازهگیری و ثبت میشود. دوربین تئودولیت را مطابق شکل 5 در نزدیکی مخزن نصب نموده، به تعیین موقعیت سایر ایستگاهها بپردازید. تعیین موقعیت ایستگاهها باید به گونهای باشد که بهطور کامل در برگیرندهی دایرهی محیطی مخزن باشد.
حداقل تعداد ایستگاههای مورد نیاز T1، T2،T3، … که بر حسب محیط مخزن مشخص میگردد، در جدول شمارهی 4 ارائه شده است. افزایش تعداد ایستگاهها میتواند انحراف در نتایج حاصله را کاهش داده، موجب ارتقاء دقت اندازهگیری شود.
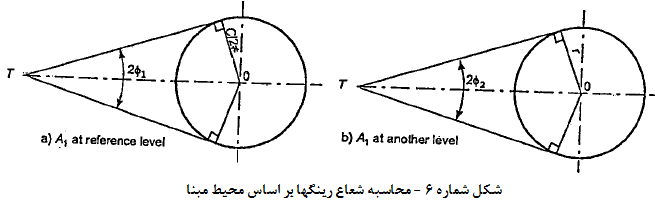
از هر ایستگاه و در ارتفاعهای مختلف، دو خط دید مماسی از تئودولیت بر بدنهی مخزن در نظر بگیرید. در ارتفاع مورد نظر، ابتدا خط دید را بر یک طرف مخزن مماس کرده و سپس بدون تغییر زاویهی عمودی، دوربین را بچرخانید تا به خط مماس بر سمت دیگر مخزن برسید. به عبارت دیگر تئودولیت در این مرحله به هیچ عنوان به طرف بالا یا پایین حرکت نکند. زوایای افقی میان دو مماس را قرائت و یادداشت نمایید. در همان ارتفاعی که محیط مبنا اندازهگیری شده است نیز از هر ایستگاه زاویهی بین دو خط دید مماسی (از تئودولیت بر بدنه) را اندازهگیری و ثبت شود.
برای هر ایستگاه تئودولیت (مثل T1)، بر روی هر حلقه در دو ارتفاع که باید حدود 20℅ – 25℅ از پایین حلقه و20℅ – 25℅ از بالای حلقه فاصله داشته باشند، زاویهخوانی خواهد شد. تئودولیت را از ایستگاه T1 به ترتیب به ایستگاههای T2 و T3 و . . . منتقل کرده تا محیط مخزن کاملاً پوشش داده شود، در این حالت تمامی مراحل تکرار گردد.
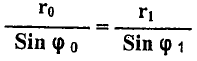
با توجه به اینکه در یک ارتفاع خاص هم زاویهی مماسی و هم محیط مبنا اندازهگیری شده و در ارتفاعهای دیگر زاویهی مماسی مشخص گردیده است، میتوانیم با استفاده از رابطهی مثلثاتی بین آنها، اقدام به محاسبهی شعاع در هر ارتفاع از مخزن نماییم.
2-3-2 استفاده از روش مثلثاتی براساس فاصلهی دو ایستگاه
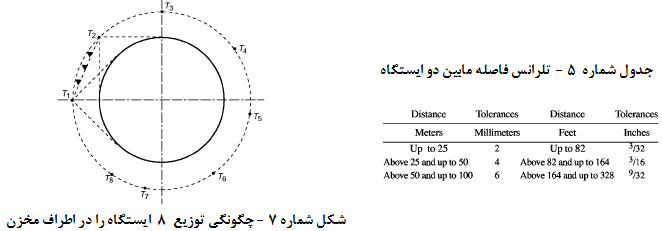
تعداد ایستگاههای لازم جهت انجام اندازهگیری محیط به روش فاصلهی دو ایستگاه، بستگی به محیط مخزن دارد و جدول شماره 4 حداقل ایستگاههای لازم را ارائه مینماید. دو ایستگاه T1 و T2 تئودولیت را تعیین کرده و دوربین را مطابق دستورالعمل در ایستگاه T1 مستقر کنید. به شکل شماره 7 که چگونگی توزیع 8 ایستگاه را در اطراف مخزن به نمایش گذاشته است، توجه کنید.
در این مرحله باید فاصلهی ایستگاه T1 را از ایستگاه T2 اندازهگیری و یادداشت نمود. از ایستگاه T1 یک خط دید بر ایستگاه T2 و دو خط دید مماسی بر دو طرف بدنهی مخزن در نظر بگیرید. حال اقدام به قرائت زاویای میان دو مماس و خط واصل دو ایستگاه T1 و T2 نموده و زاویای مذکور را برحسب: درجه، دقیقه و ثانیه یادداشت نمایید. سپس زوایای مماسی را به ترتیب برای حلقههای بالاتر اندازهگیری و ثبت کنید. اندازهگیری زوایا برای هر حلقه باید در دو ارتفاع صورت گیرد، 20 تا 25 درصد پایینتر از درز جوش بالایی و 20 تا 25 درصد بالاتر از درز جوش پایینی.
پس از اتمام اندازهگیری زوایا در ایستگاه T1، دوربین را به ایستگاه T2 منتقل و کلیه مراحل را برای این ایستگاه تکرار کنید. دقت کنید که فاصلهی دو ایستگاه T1 و T2 در دو مرحلهی اندازهگیری شده است و دو اندازهی بهدست آمده، باید با یکدیگر همخوانی داشته باشند. رواداری فاصلهی بین دو ایستگاه در جدول شماره 5 ارائه گردیده است. به عبارت دیگر، اختلاف این دو اندازه باید در حد قابل قبول باشد.
در حالی که دوربین هنوز در ایستگاه T2 قرار دارد، سه پایه را از ایستگاه T1 به ایستگاه T3 منتقل و کلیه مراحل ذکر شده برای دو ایستگاه T2 و T3 اجرا میگردد.
حال که زوایای مماسی مخزن را به دست آوردهایم، میتوانیم شعاع مخزن را به ازای جفت ایستگاههای مختلف محاسبه کنیم. با استفاده از روابط سادهی مثلثاتی این امر قابل حصول خواهد بود. با دقت به شکل شماره 8، خواهیم داشت:
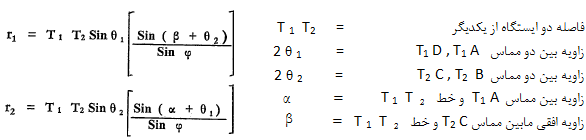
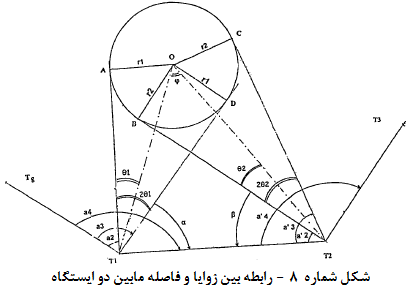
پس از کسر نمودن ضخامت دیواره مخزن، شعاع داخلی به دست خواهد آمد. میانگین شعاعهای حاصله برای هر ارتفاع را به دست آورده و محاسبات جدول ظرفیت را بر مبنای آنها انجام میدهیم.
2-4 هدفگیری و سنجش فاصله با کمک خط مبنای نوری
در این روش از دستگاه EODR که قابلیت اندازهگیری زاویه تا 1± ثانیه و اندازهگیری فاصله تا mm 1± را داشته باشد، استفاده میشود.
دو مجموعه از نقاط هدف[ii] را بر روی هر حلقه در نظر گرفته؛ یک مجموعه از نقاط در 1/5 تا 1/4 ارتفاع حلقه و بالاتر از درز جوش پایینی؛ دیگر مجموعه نقاط در 1/5 تا 1/4 ارتفاع و پایینتر از درز جوش بالایی حلقه. تعداد نقاط هدف که بر روی هر حلقه از دیوارهی مخزن انتخاب میشود، بستگی به محیط آن مخزن دارد. حداقل تعداد نقاط هدف در هر مجموعه که تابعی از محیط مخزن میباشد، در جدول شماره 6 ارائه شده است.
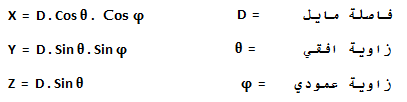
تمام نقاط هدف که در یک سطح افقی از یک حلقه قرار دارند را توسط دستگاه EODR نشانهگیری کرده، فاصله مایل؛ زاویهی افقی و زاویهی عمودی آن را اندازهگیری کنید. توجه به شکل شماره 9 چگونگی این کار را به خوبی بیان میکند.
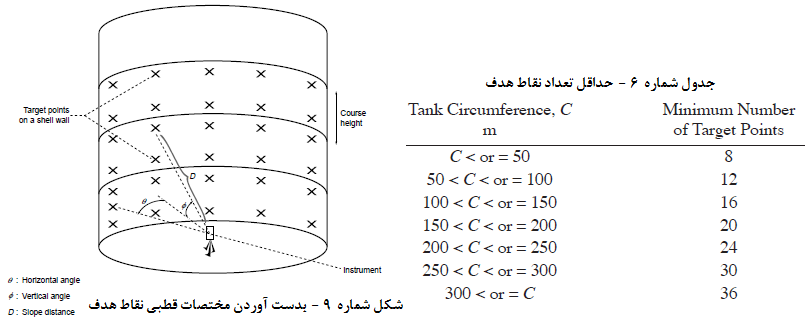
پس از تکمیل اندازهگیری مختصات قطبی کلیهی نقاط بر روی حلقهی مورد نظر، به حلقهی بعدی رفته و اندازهگیریها را بر روی نقاط هدف آن حلقه آغاز کنید. اندازهگیریها باید از پایینترین حلقه آغاز و به ترتیب به حلقههای بالاتر تسری یافته و تا بالاترین حلقه ادامه یابد. مختصات قطبی هر نقطه هدف با استفاده از معادلات زیر به مختصات دکارتی تبدیل خواهد شد:
پس از آنکه موقعیت نقاط هدف مختلف تعیین گردید صرفاً براساس مختصات دکارتی که میتوانند موجب تغییر نتایج شوند، اقدام به محاسبهی شعاع مینماییم. ]5[ ]9[
- معایب احتمالی
4-1. زحمت زیاد، احتمال خطر برای کارکردن در ارتفاع از جمله معایب روش Strapping برای حلقههای بالا میباشد. در دسترس نبودن حلقههای بالا برای این روش باعث میشود که یا از بستن داربست و ایجاد دسترسی برای کارکنان استفاده شود و یا از تعدادی حلقه و طناب بهره جوییم. حالت اول توسط هیچ یک از کارکنان استقبال نمیشود و در مورد حالت دوم باید گفت به دو علت، خطای اندازهگیری افزایش خواهد یافت:
الف. ایجاد فضای خالی زیر نوار اندازهگیری؛
ب. عدم تسلط به باند اندازهگیری احتمال اعوجاج در نوار را افزایش داده و تأثیر نامطلوبی بر دقت کالیبراسیون میگذارد.
4-2 . روشهای ORLM و OTM به شدت وابسته به محیط مبنای حلقهی یک بوده و در صورت خطا در اندازهگیری، این خطا منتقل میشود.
4-3 . در روش مثلثاتی براساس فاصلهی دو ایستگاه، احتمال افزایش خطا به علت عدم دقت در فاصلهی مبنا، زیاد میباشد. حتی خطایی در حد متر نیز گزارش شده است.
4-3 . روش EODR صرفاً داخلی است و برای مخازن حاوی فرآورده مناسب نیست.
- روش پیشنهادی
در صورت وجود مخازن عایقدار و حتی غیر عایق، در صورت امکان و خالی بودن مخزن، روش EODR دارای ضریب اطمینان بسیار بالایی میباشد ]1[.
اما در بسیاری مواقع امکان ورود به مخزن وجود ندارد، بنابراین پیشنهاد میشود از روش ابداعی زیر جهت به دست آوردن محیط حلقههای مخزن استفاده شود:
در این روش نیز مانند خط مبنای نوری از دوربین توتال استیشن و EODR بهره میگیریم. با این تفاوت که در روش پیشنهادی نیازی به تخلیهی مخزن و ورود به مخزن نمیباشد.
برای شروع تعدادی ایستگاه خارج از مخزن مشخص میکنیم به گونهای که محیط مخزن را کاملاً پوشش دهند. دوربین توتال استیشن را در ایستگاه 1 قرار داده و از آن بر روی حلقهی 1 مختصات قطبی سه نقطه هدف را بر اساس نقطه هدف مبنا به دست میآوریم. بر روی حلقههای بالاتر در 2 ارتفاع 20% و 80% هر کدام سه نقطه در نظر میگیریم. مختصات قطبی دستههای سهتایی نقاط را بر روی هر باند اندازهگیری بهدست خواهیم آورد.
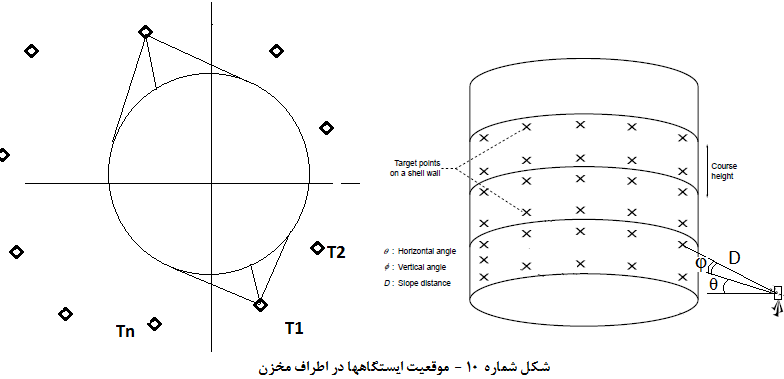
به عبارت دیگر بر روی حلقه یک، از هر ایستگاه یک دستهی سه تایی و برای حلقههای بالاتر 2 دستهی سهتایی نقاط را مشخص و مختصات قطبی آنها را توسط دوربین توتال استیشن قرائت و گزارش میکنیم.
در دستههای سه تایی نقاط الزامی وجود ندارد که پرتوها مماسی باشند ولی بهتر است که نقاط با فاصلهای تقریباً حداکثر از یکدیگر باشند. با توجه به اینکه دستههای سه تایی مستقل از یکدیگر هستند، نیازی نیست که فواصل آنها از مخزن به یک اندازه باشد. این موضوع در شکل شماره 10 کاملاً مشهود است.
در مرحلهی بعد مختصات دکارتی تمامی دستههای سه تایی را محاسبه میکنیم. از هر دستهی سه تایی، مختصات دکارتی 3 نقطه بهدست میآید که بر حسب آنها میتوانیم یک دایره رسم و محیطش را محاسبه کنیم. در نهایت میانگین محیطها را به عنوان محیط هر حلقه پذرفته میشود.
- نتیجه
- روش اندازهگیری با نوار، به دلیل مشکلات و خطاهای احتمالی مناسب تلقی نمیگردد.
- روشهای مثلثاتی OTM بهشدت وابسته به محیط مبنای حلقه 1 و یا فاصلهی 2 ایستگاه میباشند و توصیه نمیگردد.
- در صورت امکان و خالی بودن مخزن، روش EODR مورد استفاده قرار گیرد.
- در صورت عدم امکان ورود به مخزن و یا آلودگی سطح داخلی مخزن و به شرط عایق نبودن، میتوانیم از روش EODR خارجی استفاده کنیم. این روش به دلیل مستقل بودن دستههای سه تایی نقاط، دچار خطای فراگیر نخواهد شد.
مراجع
]1[ احسان عبدی دزفولی، آرش زبردست، مهدی سرلک؛ 1385، حجم سنجی مخازن ذخیره محصولات نفتی
[2] American Petroleum Institute -MPMS Ch.2 – Sec.2A
[3] American Petroleum Institute -MPMS Ch.2 – Sec.2B
[4] American Petroleum Institute -MPMS Ch.2 – Sec.2C
[5] American Petroleum Institute -MPMS Ch.2 – Sec.2D
[6] International Standards Organization ISO/CD 7505-1
[7] International Standards Organization ISO/CD 7505-2
[8] International Standards OrganizationISO/CD 7507-3
[9] International Standards OrganizationISO/CD 7507-4
[1] Reference Circumference
[i] Optical Triangulation Method
[ii] نقطهی هدف (Target Point) یک نقطه از مجموعه نقاطی که بر روی سطح داخلی دیواره مخزن اختیار شده، فاصله مایل آن تا دوربین و همچنین زاویه افقی و عمودی آن نسبت به نقطه مبنا به مرکزیت دوربین اندازهگیری میشود.