سیال نخستین انتخاب انسان برای تحقق مفهوم اتوماسیون بوده است. با پیشرفت علم و کشف خواص سیالهایی نظیر روغن کاربردهای متنوعی برای استفاده از روغن ابداع شد. رویارویی با محدودیتهای استفاده از روغن مهندسان را بر آن داشت تا جایگزینی مناسبی همچون هوا را در دستور کار خود قرار دهند و این سرآغاز توسعه سامانههای پنوماتیک بود. در قسمت نخست این مقاله به موضوعاتی چون تاریخچهی استفاده از اجزا و سامانههای هیدرولیک و پنوماتیک، تعاریف، قوانین فیزیکی حاکم بر این سامانهها و کاربردهای آنها پرداختیم. در قسمت دوم که در ادامه آمده ضمن مقایسهی این دو سامانه اجزای اصلی آنها تشریح خواهد شد.
مقایسهی کلی سامانههای هیدرولیک و پنوماتیک
- در سامانههای پنوماتیک از سیال تراکم پذیر مثل هوا و در سامانههای هیدرولیک از سیال تراکم ناپذیر مثل روغن استفاده میشود؛
- در سامانههای هیدرولیک روغن علاوه بر انتقال قدرت وظیفهی روغن کاری قطعات داخلی سامانه را نیز بر عهده دارد ولی در پنوماتیک علاوه بر روغن کاری قطعات، باید رطوبت موجود در هوا را نیز از بین برد ولی در هر دو سامانه سیال باید عاری از هر گونه گرد و غبار و نا خالصی باشد؛
- فشار در سامانههای هیدرولیکی بهمراتب بیشتر از فشار در سامانههای پنوماتیکی میباشد، حتی در مواقع خاص به ۱۰۰۰ مگا پاسکال هم میرسد. در نتیجه قطعات سامانههای هیدرولیک باید از مقاومت بیشتری برخوردار باشند.
- در سرعتهای پایین دقت محرکهای پنوماتیک بسیار نامطلوب است در صورتی که دقت محرک های هیدرولیکی در هر سرعتی رضایت بخش است
- در سامانههای پنوماتیک با سیال هوا نیاز به لولههای بازگشتی و مخزن نگهداری هوا نمیباشد.
- سامانههای پنوماتیک از بازده کمتری نسبت به سامانههای هیدرولیک برخوردارند.
قابلیت تحمل فشار بالا (بیش از ۲۰۰ بار) و همچنین تنشهای حرارتی بالای درون سیلندر برای قطعات سیلندر از جمله پیستون بسیار حیاتی است. تلاش برای افزایش استحکام پیستونها با محدودیت اندازه همراه است. به تازگی پیستونهای مونوترم[i] تولید شدهاند که استحکام و عمر بالا، وزن و اصطکاک کمتری دارند. پیش از این نیز پیستونهای فروترم[ii] تولید شده بودند که جایگزین پیستونهای آلومینیومی سنتی شدند. تاج این پیستون از فولاد فورج شده و پایهی آن از جنس آلومینیوم ساخته میشود.
پیستونهای مونوترم از یک قطعهی فورج شده ساخته میشوند و در نتیجه بر خلاف پیستونهای فرو ترم پایه پیستون(با بدنه و تاج آن یکپارچه ساخته میشود. اتصال مستقیم پایهی پیستون به بدنه موجب میشود تا مقطع تحمل کننده فشار در پیستون برای تحمل حداکثر فشار داخل سیلندر افزایش یابد. در نتیجه پین پیستون نیازی به نگه داشتن پایه پیستون ندارد و میتواند کوتاهتر و سبکتر باشد. پایهی فولادی که در برابر حرارت پایدار است اصطکاک را کاهش داده و همچنین کاهش فواصل آببندی منجر به هدایت بهتر پیستون میشود. هدایت بهتر پیستون بهویژه در قسمت رینگها باعث کاهش مصرف روغن میشود. علاوه بر آن پیستونهای مونوترم استحکام و عمر بیشتری دارند. این نوع پیستون علاوه بر تحمل حداکثر فشار تا ۲۵۰ بار مزایای دیگری از جمله کاهش مصرف سوخت و روغن و کاهش صدا و وزن دارند. هماکنون موتورهای دارای پیستون مونوترم درامریکای شمالی به تولید انبوه رسیده است و در حال حاضر بیشتر در وسایل نقلیه، ساختمان سازی و صنایع دریایی استفاده میشوند. استفاده از پیستونهای مونوترم در اروپا و آسیا نیز در حال افزایش است.
جدول 1. مزیتهای سامانههای هیدرولیک و پنوماتیک
سامانههای هیدرولیک | سامانههای پنوماتیک |
• اجرای فرمانهایی که نیاز به قدرت زیاد دارند؛ • روانکاری قطعات برای جلوگیری از فرسایش به هنگام کار؛ • عملکرد قابل قبول تا حد شرایط واماندگی بدون آسیب به سامانه. | • اجرای فرمانهایی که نیاز به قدرت کم دارند؛ • بازده بالا؛ • قابلیت کنترل پذیری؛ • سادگی تعمیر و نگهداری؛ • قیمت ارزان (هوا در همه جا یافت می شود)؛ • امکان ارسال فرمان از اتاق کنترل به سایت؛ |
جدول 2. معایب سامانههای هیدرولیک و پنوماتیک
سامانههای هیدرولیک | سامانههای پنوماتیک |
• تاخیر در دریافت سیگنال فرمان به عملگر؛ • کندی حرکت؛ • هزینهی بالای تجهیزات و راه اندازی؛ • کنترل در محل؛ • آلودگی بالا؛ | • آلودگی صوتی؛ • نیازمند بازدیدهای دورهای تعمیر و نگهداری؛ • عدم کنترل در محل؛ • وجود لوازم جانبی بسیار زیاد؛ |
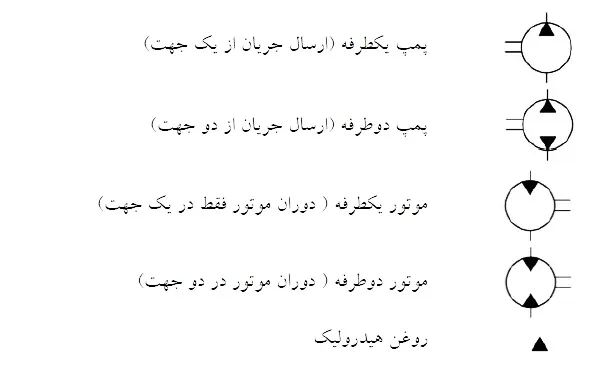
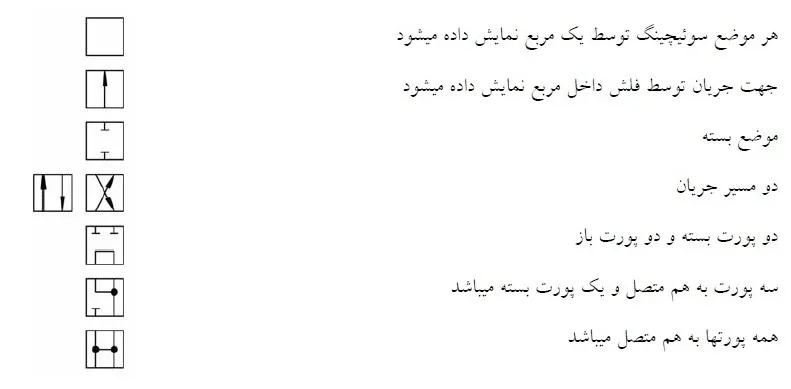
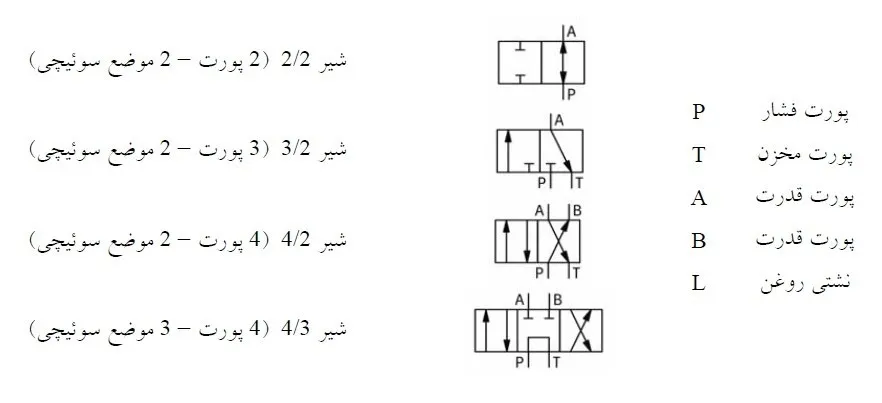
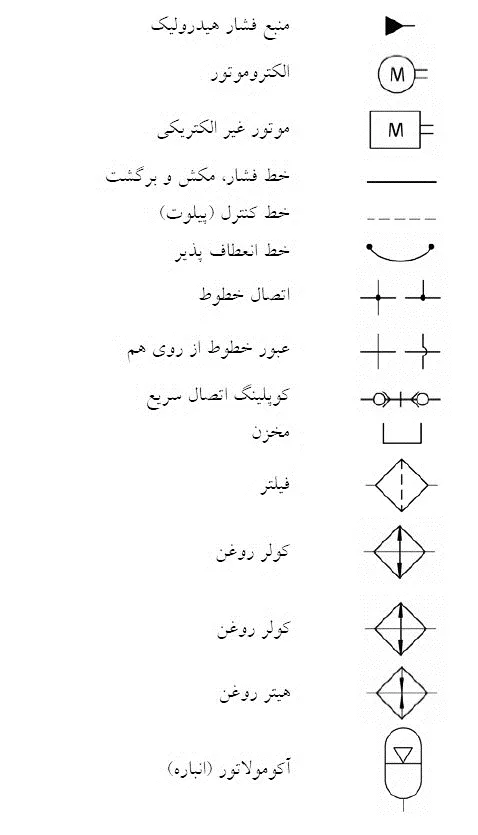
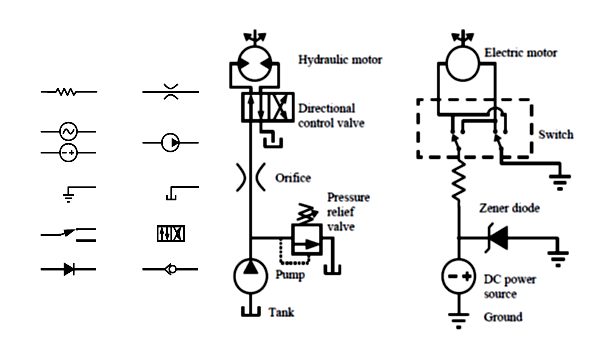
اجزای سامانه و علایم اختصاری
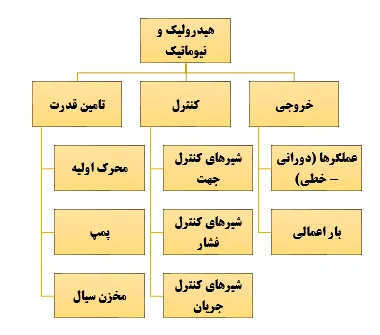
بهطور کلی سامانههای هیدرولیک و پنوماتیک از اجزای اصلی زیر تشکیل شدهاند:
- واحد تأمین قدرت
- واحد کنترل
- واحد خروجی
تأمین قدرت: جریان مورد نیاز سامانه ایجاد و ارسال میشود.
محرک اولیه: قطعهای است که توان مورد نیاز را برای به گردش درآوردن پمپ تأمین میکند.
پمپ: توان مکانیکی را گرفته و به توان سیالاتی (سیالی که فشار دارد و جاری است) تبدیل میکند.
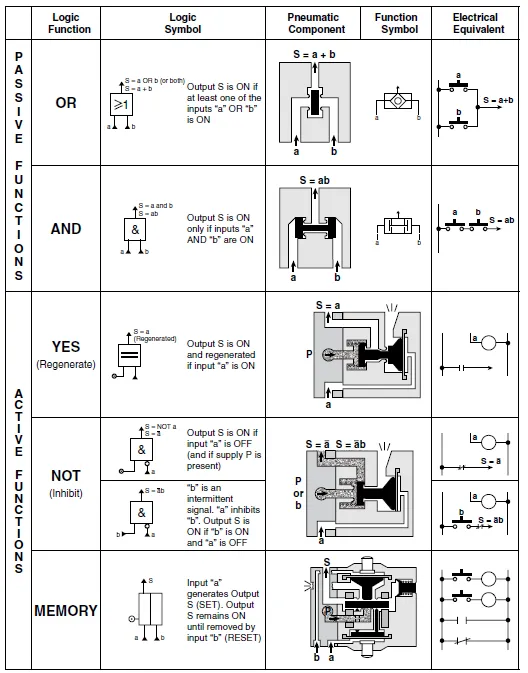
کنترل: قسمت میانی یک سامانهی هیدرولیک است که کنترل عملکرد سامانه را به عهده دارد.
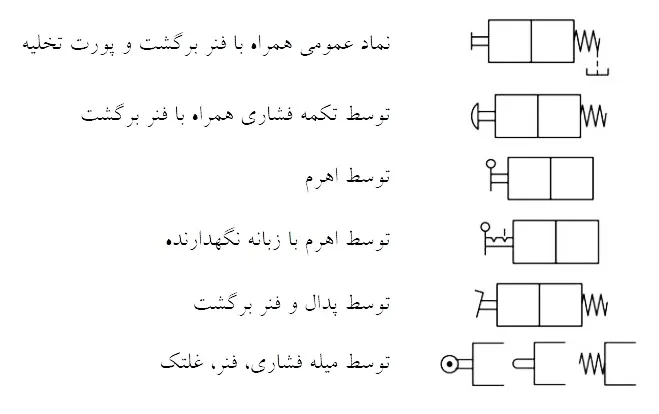
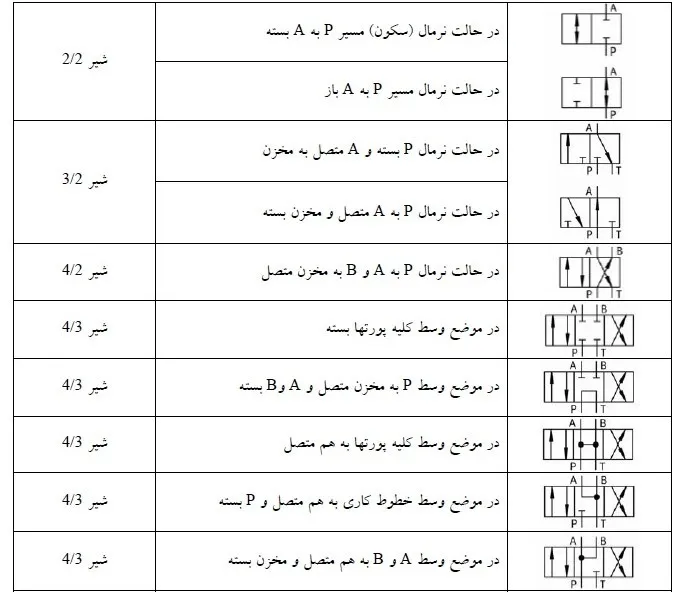
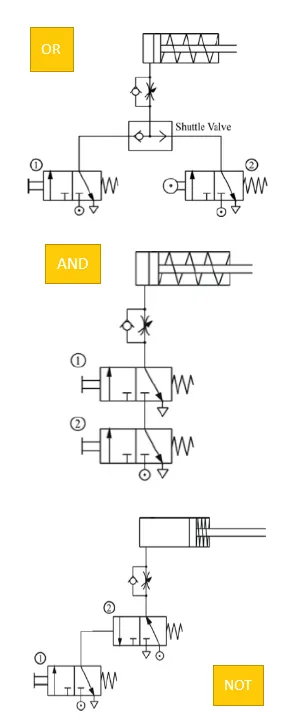
شیرهای کنترل جهت: با کنترل جهت میتوان جهت حرکت عملگرها را کنترل کرد.
شیرهای کنترل فشار: با کنترل فشار سیال میتواند نیروی خروجی عملگرها را کنترل نماید.
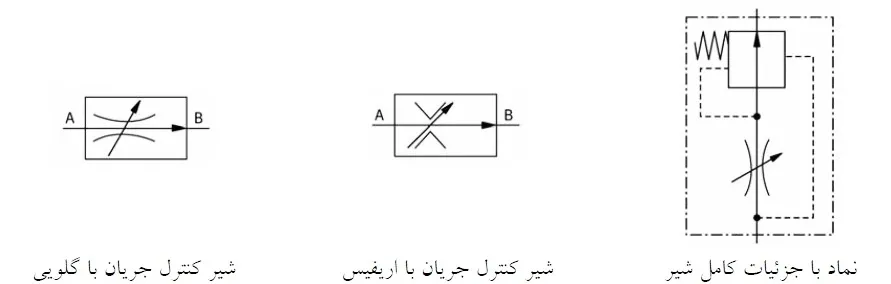
شیرهای کنترل جریان: با کنترل شدت جریان سیال میتوان سرعت حرکت عملگر را کنترل کرد.
خروجی: قسمت خروجی سامانه شامل عملگرها و بار مالی میباشد.
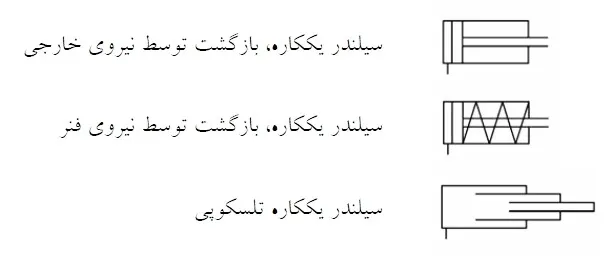
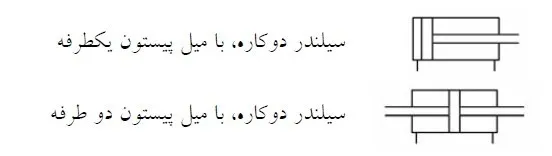
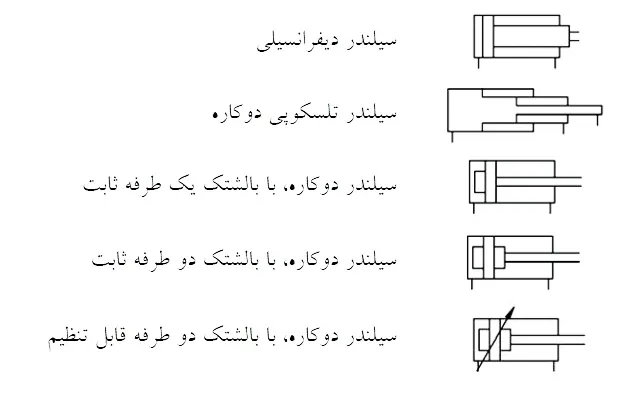
عملگر: قطعهای است که توان سیال را به توان مکانیکی تبدیل میکند و این توان بار را حرکت میدهد.
انواع عملگر: 1) خطی (سیلندرها) که حرکت مستقیم الخط ایجاد میکنند. 2) دورانی (موتورهای هیدرولیک) که حرکت دورانی و گردشی به وجود میآورند.