۱-انواع Voting
در صنایع فرآیندی که سامانههای SIS مورد استفاده قرار میگیرند، انواع Voting وجود دارد که کاربرد آن در حسگرها، عملگرها و همچنین سامانهی کنترل مورد استفاده است. کلمهی Voting در زبان انگیسی به معنی رأیگیری وVote به معنی رأی یا نظر دادن است. در این مبحث معنی کلمهی Vote وضعیت یا سیگنال یک عضو از حلقهی SIF است که سبب توقف ایمن یا خطرناک (در صورت از کارافتادن آنها) فرآیند میشود و به علت اینکه میتواند هر عضو حلقهی SIF بهصورت افزونگی یا سهتایی و در بعضی از موارد حتی بیشتر هم وجود داشتهباشد، وضعیت یا سیگنالِ اکثریت، تصمیمگیرنده است. در ادامهی این نوشتار از کلمهی Vote با توجه به مفهوم توضیح دادهشده استفاده خواهد شد. در زیر برخی از رایجترین انواع Voting نام برده میشود و به بررسی و استفاده از آنها در مورد حسگرها اکتفا کرده ولی عین موارد مورد بحث در خصوص عملگرها و سامانهی کنترلی نیز صادق است :
- یک – از – یک (1oo1)؛
- یک – از – دو (1oo2)؛
- دو – از – دو (2oo2)؛
- دو – از – سه (2oo3).
Voting از دو بخش یا به عبارت دیگر از دو عدد تشکیل شده است. عدد اول نشان دهندهی تعداد تجهیزی است که Vote آن باعث توقف خط تولید میشود. عدد دوم تعداد کل تجهیزات را نشان میدهد. برای مثال 2oo2 یعنی ٰVote هر دو تجهیز از دو تجهیز موجود باید با هم سبب توقف خط تولید شوند. در بعضی از موارد پسوند D که مخفف Diagnostic است نیز به حالتهای بالا اضافه میشود که نشاندهندهی قابلیت عیبیابی تجهیزات مورد استفاده است، مانند 1oo2D. این تجهیزات بهصورت هوشمند بوده و میتوانند تشخیص دهند که کدام تجهیز در صورت داشتن نظر متفاوت کارکرد درست دارد.
قبل از شروع توضیحات دربارهی انواع Voting برای موقعیتهای مختلف باید به نوع خراب شدن تجهیزات سامانهی SIS اشاره شود. خرابی سامانهی SIS به دو صورت زیر است:
- ایمن (کاذب، آغازکردن، مشهود)؛
- خطرناک (بازداشتن، ناپیدا).
نوع «ایمن» توقف خط تولید به علت مشکلاتی حادث میشوند که اصولاً ماهیت ایمنی ندارند و بهصورت ساختگی یا فرضی ایجاد شدهاند. مانند قطع یا شکستگی در مسیر هوای فشردهی یک شیر قطع/وصل که میتواند منجر به افت فشار و مانع بستهشدن آن گردد و به همین دلیل، علیرغم وجود نداشتن یک خطر در فرآیند، باید خط تولید متوقف گردد. در نوع ایمن، خط تولید متوقف میشود ولی سامانهی SIS کارکرد صحیح خود را دارد و در دسترس (available) است.
نوع «خطرناک» برعکس نوع اول است. در این حالت حادث شدن وضعیت خطرناک باعث فعال شدن SIF و کارنکردن آن به علت خرابی تجهیز و عدم توقف ایمن خط تولید میشود. برای مثال اگر در یک خط تولید از یک شیر توپی استفاده شود و به هر دلیلی مانند جرمگرفتگی شیر مورد اشاره، هنگامی که باید بستهشود، عملکرد درست نداشته باشد، فرآیند به سمت خطرناک و عملنکردن قابلیت ایمنی مورد انتظار پیش میرود. در این حالت کارخانه و خط تولید پابرجا است و تولید ادامه دارد اما SIS در دسترس نیست. در نتیجه امکان سوق فرآیند تولید به حالت ایمن و توقف آن در صورت نیاز وجود ندارد.
فهمیدن این دو مورد خرابی سامانهی SIS مهم است. زیرا استفاده از قابلیت افزونگی فقط بر اساس Voting انتخابی میتواند بر روی این دو حالت تأثیرگذار باشد. در ادامه به توضیح انواع Voting پرداخته میشود.
۲-توضیح انواع Voting
برای بررسی هر یک از حالتهای Voting در این نوشتار خود را محدود به سیگنالهای ورودی (حسگرها) کرده، گو اینکه تحلیل حالتهای Voting برای عملگرها و سامانهی کنترل نیز مانند حسگرها است و فرق چندانی ندارد.
برای هر حسگر یا تجهیز یک نماد کنتاکت در نظر گرفته میشود. در حالت عادیِ کارکرد حسگر این کنتاکتها بسته هستند و جریان برق از داخل آنها جاری است و به اصطلاح مدار برقدار است. در حالت توقف ایمن معمولاً مدار بیبرق میشود به عبارت دیگر تیغهی کنتاکت باز میشود.
حالت خراب حسگر یا عملکرد نادرست آن هنگامی است که کنتاکت به علت خرابی همواره بسته بماند (خالجوش تیغهی کنتاکت) و در زمانی که باید بازشود، این امر حادث نشود و مدار برقدار باقی بماند. این حالت خطرناک است.
حالت سیگنال کاذب این است که کنتاکت در حال عادی کار باید بسته باشد ولی به دلایل کاذب باز میشود و مدار را بیبرق میکند. در این حالت به علت وجود سیگنال کاذب و نه به دلیل خرابی یک تجهیز حالت توقف رخ میدهد. در این حالت SIF عملیاتی است و ایمنی پابرجا است.
1-2 – یک – از – یک (1oo1)

در انتخاب یک از یک فقط یک تجهیز (A) وجود دارد. در شکل 1 بهصورت نمادی این نوع از Voting نشان داده شده است. این نوع از ساماندهی تجهیزات سادهترین، ارزانترین و مرسومترین روش است. اگر با این آرایش یعنی استفاده فقط از یک تجهیز بتوان به ایمنی مورد انتظار رسید، این انتخاب بهترین است، در غیر اینصورت باید از روش افزونگی (2oo2) استفاده کرد. برای مثال میتوان کنتاکت حسگر برای فشار یا سطح یک مایع را نام برد. در SIS معمولاً در حالت توقف ایمن، تجهیزات بدون برق میشوند. اگر به هر دلیلی تجهیز در حالت توقف اضطراری بدون برق نشود یا بهصورت نمادین کنتاکت بر اثر چسبیدن تیغهی آن بر اثر خالجوش برای بیبرق کردن جدا نشود، باعث ایجاد حالت خطرناک میشود. در حالت 1oo1 چون فقط یک تجهیز وجود دارد به همین دلیل کیفیت و احتمال ازکارافتادن آن، در وضعیت توقف ایمن اثر مستقیم دارد. در نوع (1oo1) اصولاً ایمنی کارکرد یا توقف ایمن در صورت خرابی تجهیز وجود ندارد.
برای مقایسهی انواع Voting از دو مقدار میتوان استفاده کرد. اولین مقدار عدد PFDaverage [iii] است. این عدد نشاندهندهی احتمال کارنکردن یک تجهیز در هنگام نیاز است. مقیاس دیگر STR[iv] است. این عدد گویای تواتر حالت توقف ناخواسته (نادرست) یک فرآیند بدون وجود وضعیت خطرناک و فقط بر اساس یک سیگنال کاذب است. مقیاس زمانی دو مقدار ذکرشده سال است.
STR | PFD | نوع Voting |
4.5E-6 | 3.3E-2 | 1oo1 |
2-2 – یک –از – دو (1oo2)
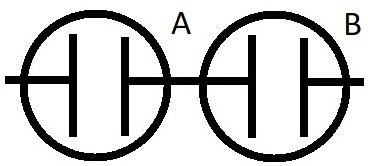
در انتخاب یک از دو ، دو تجهیز (A, B) وجود دارد که به صورت نمادی در حالت سری به هم متصل هستند. معنی آن این است که vote هر کدام از تجهیزات باعث ایجاد حالت توقف اضطراری (یا به اصطلاح بیبرق شدن) میشود. این حالت از Voting دارای «ایمنی» است زیرا احتمال خراب شدن هر دو تجهیز که باعث ایجاد خطر یا به عبارت دیگر سوق ندادن سامانه به طرف حالت توقف ایمن کمتر از حالت قبل است. در این نوع یک خرابی خطرناک قابل تحمل است زیرا تجهیز سالم دیگر خط را بدون برق یا انرژی میکند (توقف ایمن). این آرایش اما قابلیت تحمل یک سیگنال کاذب برای توقف ناخواسته را ندارد. باید در نظر داشت که تعداد بیشتر تجهیز باعث بالا رفتن احتمال ایجاد سیگنال کاذب و در پیامد آن حالت توقف ناخواسته میشود. به همین دلیل مقدار عددی STR دو برابر حالت 1oo1 است در حالی که میزان PFD به علت اینکه احتمال خرابی هر دو تجهیز به صورت همزمان بسیار کم است کمتر از حالت قبل است. از این حالت Voting در مواقعی استفاده میشود که به ایمنی بالاتر نیاز است ولی امکان رسیدن به درجه SIL مناسب وجود ندارد و STR بالا قابل تحمل است.
STR | PFD | نوع Voting |
9.0E-6 | 1.4E-3 | 1oo2 |
3-2 – دو – از – دو (2oo2)
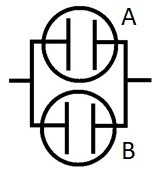
در انتخاب دو از دو ، دو تجهیز (A, B) وجود دارد که به صورت نمادی در حالت موازی به هم متصل هستند. معنی آن این است که Vote هر دو تجهیز باعث حالت توقف ایمن اضطراری (بیبرقشدن) میشود (برخلاف 1oo2). هنگامی هر دو تجهیز باز شوند امکان بیبرق کردن یا حالت توقف ایمن حادث میشود. این حالت از Voting قابلیت تحمل خرابی خطرناک را ندارد به عبارت دیگر خراب بودن یکی از تجهیزات باعث ایجاد خطر برای کل سامانه خواهد بود.
این نوع از Voting قابلیت تحمل یک خرابی از تجهیز به عنوان خرابی کاذب را دارد ولی همانطور که بیان شد قابلیت تحمل خرابی خطرناک را ندارد. به همین دلیل عدد PFD بالا و در عوض STR پایین است. در صورتی که یک دستور کاذب برای توقف از طرف یک تجهیز صادر شود بهعلت وجود تجهیز دیگر امکان توقف وجود نخواهد داشت. از این حالت در جایی که باید امکان توقف کاذب را کم کرد، استفاده میشود و حداکثر SIL 1 قابل دستیابی است.
STR | PFD | نوع Voting |
2.9E-9 | 6.6E-2 | 2oo2 |
۴-۲- دو – از – سه (2oo3)
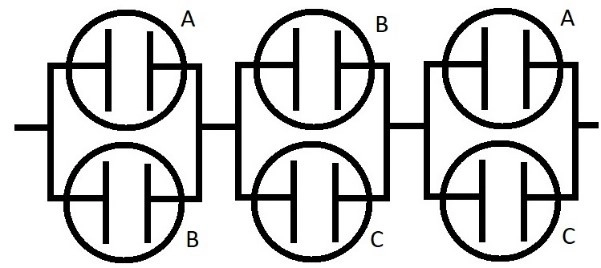
در این حالت همانطور که از اسم آن پیدا است سه تجهیز (A, B, C) وجود دارد. به همین دلیل پیادهسازی این نوع Voting پیچیدهتر و با هزینهی بالا همراه است. در این حالت vote دو تجهیز از سه تجهیز برای توقف اضطراری ضروری است. به علت اینکه سه تجهیز وجود دارد تمامی حالت دو از سه در شکل ۴ نشان داده شده است. این حالت از Voting مخلوطی از حالتهای گفته شده در بالا است. در این نوع یک درجهی تحمل برای حالت خرابی ایمن (کاذب) و یک درجهی آزادی برای خرابی خطرناک وجود دارد. به عبارت دیگر اگر یک تجهیز از کار بیافتد، دو تجهیز دیگر میتوانند فرآیند را به سمت ایمن سوق دهند و همچنین اگر یک درخواست کاذب برای توقف از یک تجهیز صادر شود، دو تجهیز دیگر اثر آن را ملغی میکنند.
از لحاظ ریاضی میتوان این نوع را سه عدد Voting از نوع 1oo2 برای حالت خطرناک و سه عدد 2oo2 برای حالت ایمن (کاذب) تصور نمود. دستیابی به 2 SIL یا SIL 3 از طریق این نوع از Voting امکانپذیر است. در جدول زیر امکان مقایسهی مقادیر PFD و STR برای هر چهار مورد گفتهشده وجود دارد.
STR | PFD | نوع Voting |
4.5E-6 | 3.3E-2 | 1oo1 |
9.0E-6 | 1.4E-3 | 1oo2 |
2.9E-9 | 6.6E-2 | 2oo2 |
8.7E-9 | 4.3E-3 | 2oo3 |
منابع:
- Comparison of Voting Arrangements in SIS, www.kenexis.com
- Book safety Instrumented System, GM International technology for safety, 4th edition
[i] Safety Instrumented System
[ii] Redundant
[iii] Average Probability of Failure on Demand
[iv] Spurious Trip Rate